QWiiLoad (previously named WiiTCPLoad) Nintendo Wii homebrew executable uploader is now fully rewritten and it’s working with recent versions of Wii homebrew channel. First version was released 12 years ago 🙂 it was my first (public) Qt project.

>=c++2a; ::metaprogramming; ::embedded; ::3d-printing; ::projects; ::misc
QWiiLoad (previously named WiiTCPLoad) Nintendo Wii homebrew executable uploader is now fully rewritten and it’s working with recent versions of Wii homebrew channel. First version was released 12 years ago 🙂 it was my first (public) Qt project.
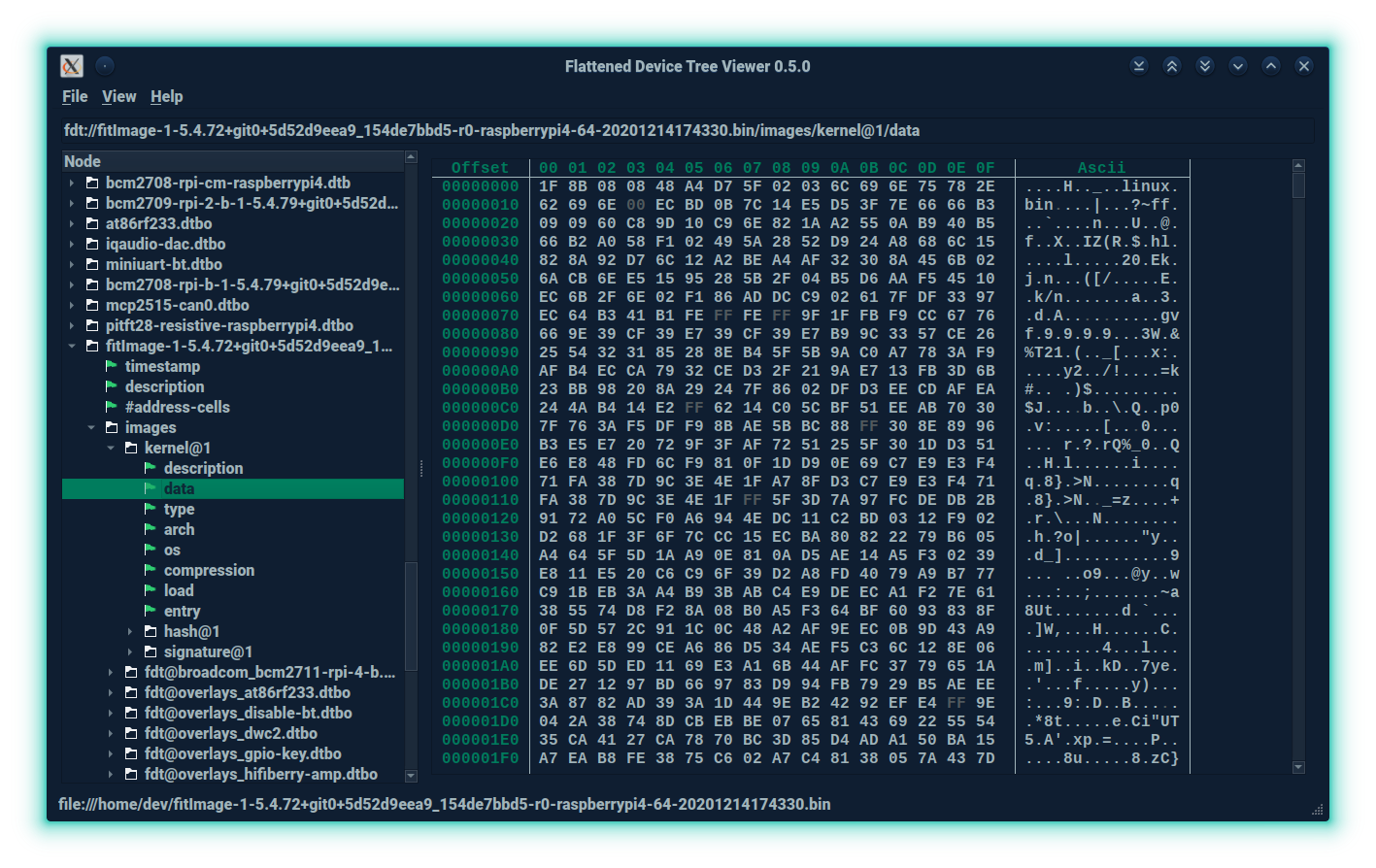
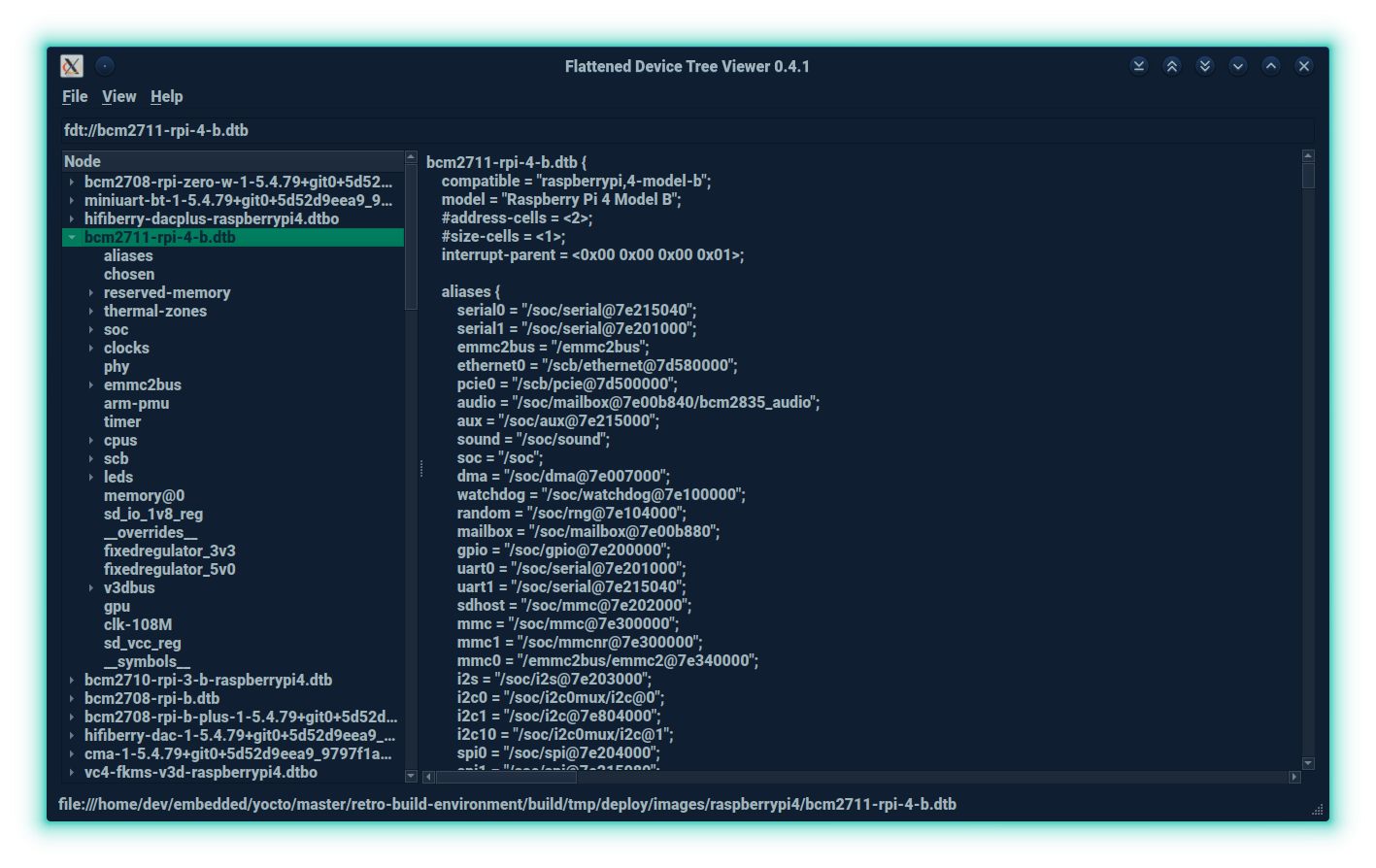
Recently I was spending some time writing devicetree configuration and configuring FIT containers. I didn’t find any graphical tool to inspect those artifacts so I wrote application to do that.
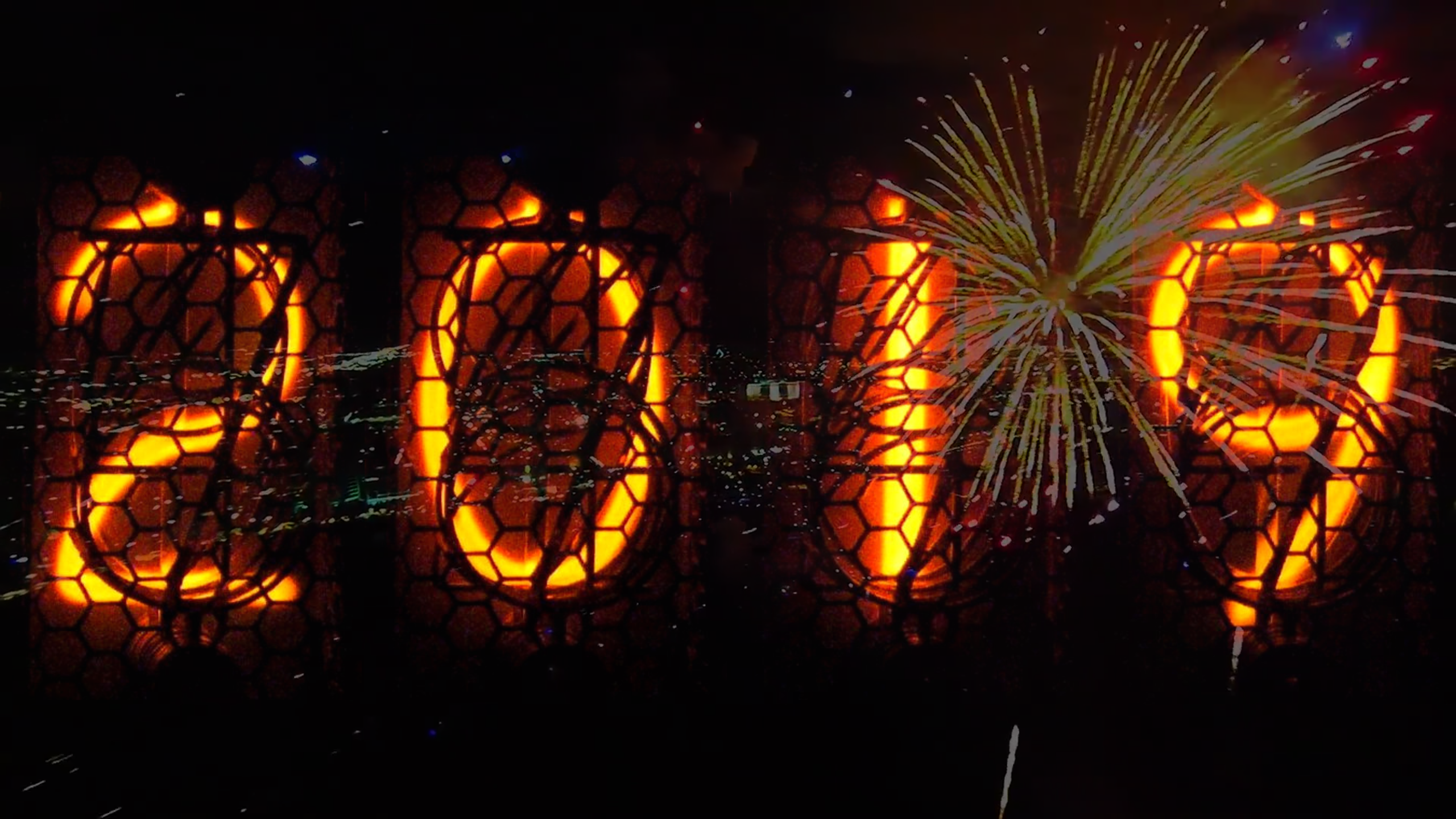
I wrote a simple clock application in qml/js language and used it as counter for new year event. You can download code here.

In meantime I’m working on wiimotedev, one of my old projects that was published as opensource software. It allow to connect wiiremotes and other custom peripherals designed for Nintendo Wii console on linux platform, emulate mouse, keyboard using wiiremotes. Currently I’m implementing a xwiimote backend that working with wiimote kernel driver and there’s a big ongoing refactor in almost every part of code since I want to write code in modern manner. I got slightly broken state right now, but new implementation getting shape. I’ll provide more information about progress in future 🙂
int main() {
initialize();
for (;;) {
sequential_animation<animation_loop,
repeat<speed<to_grb888<rainbow_animation>, 8>, 8>,
repeat<speed<to_grb888<rainbow_animation>, 4>, 4>,
repeat<speed<to_grb888<rainbow_animation>, 2>, 2>>();
}
return 0;
}
I’m working on animation framework that’s semi-type driven. If you’re not sure how it works I’ll try to explain.
Let’s examine the rainbow_animation, this is an animation object that storing current animation progress. It has three methods:
Basic use of rainbow_animation will be looking like this:
rainbow_animation animation;
while (!animation.is_finished())
{
const auto current_color = animation.value();
doSomethingWithColor(current_color);
animation.step();
}
To hide details about animation loop, we can create a templated function like this:
run_animation<doSomethingWithColorFunction, rainbow_animation>()
But if we want to run multiple animations we will end with:
run_animation<doSomethingWithColorFunction, rainbow_animation>(); run_animation<doSomethingWithColorFunction, custom_color_animation>(); run_animation<doSomethingWithColorFunction, other_color_animation>();
Until we’ll take advantage of variadic template that will call run_annimation multiple times, for every type that we’ll pass.
sequential_animation<doSomethingWithColorFunction, rainbow_animation, custom_color_animation, other_color_animation>();
But what if we want repeat a custom_color_animation 5 times?
sequential_animation<doSomethingWithColorFunction, rainbow_animation, custom_color_animation, custom_color_animation, custom_color_animation, custom_color_animation, custom_color_animation, other_color_animation>();
Is this a little ugly? To fix this problem we can create a class wrapper that will call custom_color_animation as many times as we declare.
template <animation_interface animation_type, auto times>
class repeat {
static_assert(times > 0);
public:
constexpr auto value() const noexcept {
return m_animation.value();
}
void step() {
m_animation.step();
if (m_animation.is_finished()) {
m_finished = (--m_steps) == 0;
m_animation = decltype(m_animation){};
}
}
constexpr bool is_finished() const noexcept {
return m_finished;
}
private:
int m_steps = times;
animation_type m_animation;
bool m_finished{false};
};
And now we can fix code using repeat wrapper:
sequential_animation<doSomethingWithColorFunction, rainbow_animation, repeat<custom_color_animation, 5>, other_color_animation>();
For palette conversion and animation speed, we can do similar wrappers. You can find more code there: https://github.com/dev-0x7C6/ledboard/tree/master/src/animation
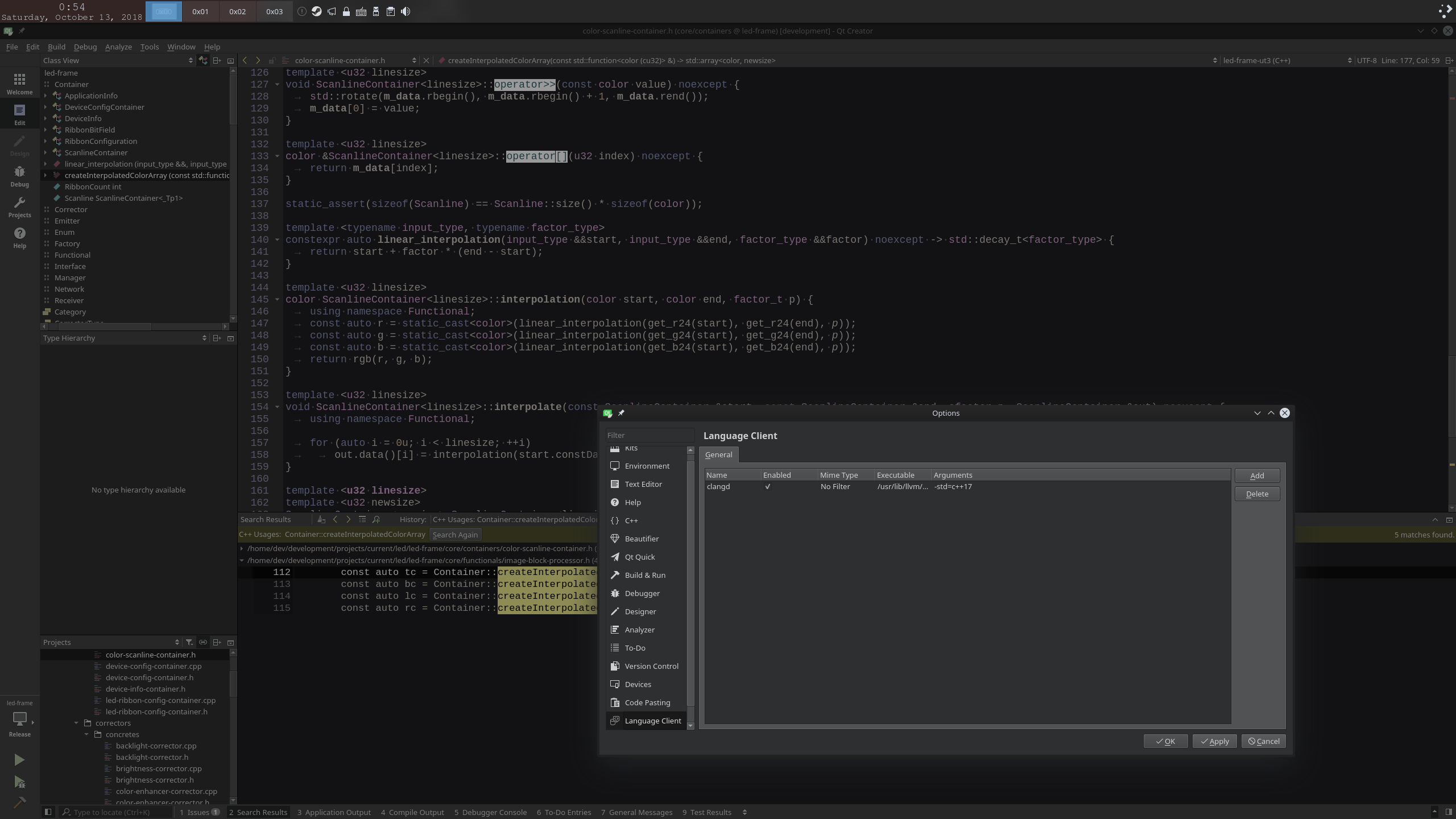
The new version of Qt-Creator arrived with experimental support for Language Server Protocol. This allow qtcreator to work with compiler that implements LSP and give a precise information about code that you’re writing. This feature is highly required to get rid of poorly written parsers in many C++ IDE’s. I’m looking forward of LSP implementation in KDevelop, that I’m using currently to develop software for avr micro-controllers.
I prepared ebuild for this version there
Overview on upcoming features in C++20. Video covers extended constexpr functionality, upcoming reflection and code injection.
I uploaded my latest project here – stand for physical cartridges 🙂

In near feature we’ll able to write nifty constrains for template arguments using concepts (C++20). I’m currently researching common use cases and trying to adopt them in my ledboard project. With GCC >= 8.1 you can enable concepts using `-fconcepts` instrumentation compile flag, but this feature is not standardized yet. The current implementation and specification on concepts might change, keep this in mind. With recent talk at CppCon by Bjarne Stroustrup we get a pretty bold picture that this feature is essential and simplify things (see Bjarne Stroustrup “Concepts: The Future of Generic Programming (the future is here)”). From my perspective them main advantage is to write zero-cost abstraction with better constrains and maintainability and get rid of template error novel.
Below there is code that I’m currently using for as static interface for my animation classes, take a look:
template<typename type>
concept bool animation_interface = requires(type a) {
{ a.value() } -> rgb // animation_interface must have method value() that returns rgb type
{ a.r() } -> u8 // requires a.r() method with integer return type
{ a.g() } -> u8 // ...
{ a.b() } -> u8 // ...
{ a.step() } -> void // requires callable a.step() method without return type
};
// without constrains
template <typename type>
constexpr auto doSomething(type &&v) { return v.value(); }
doSomething(100) // deduction from arguments to doSomething<int>(100)
// will fail with error we cannot call value() on 100 (prvalue)
// but error is hard to understand and situation is a post factum
// with constrains
template <animation_interface type>
constexpr auto doSomething(type &&v) { return v.value(); }
doSomething(100) // does not fulfilled requirements for animation_interface (nice error)
// example
class white_color_forever {
public:
auto value() -> rgb { return {r(), g(), b()}; }
auto r() { return 0xff; }
auto g() { return 0xff; }
auto b() { return 0xff; }
auto step() -> void {}
}
doSomething(white_color_forever{}); // fine, this is acceptable because
// all exceptations are meet
There are requirements that must be fulfilled. Code does not compile if template parameter do not fulfill requirements. If you’re interested there is one of my use cases: a palette_converter_wrapper. Where I’m wrapping animation inside method forwarding class and overloading value() method. This code will play nice with any type that fulfill abstraction_interface requirements 🙂 So this is a static interface, that is what we’re waiting for.