In meantime I’m working on wiimotedev, one of my old projects that was published as opensource software. It allow to connect wiiremotes and other custom peripherals designed for Nintendo Wii console on linux platform, emulate mouse, keyboard using wiiremotes. Currently I’m implementing a xwiimote backend that working with wiimote kernel driver and there’s a big ongoing refactor in almost every part of code since I want to write code in modern manner. I got slightly broken state right now, but new implementation getting shape. I’ll provide more information about progress in future 🙂
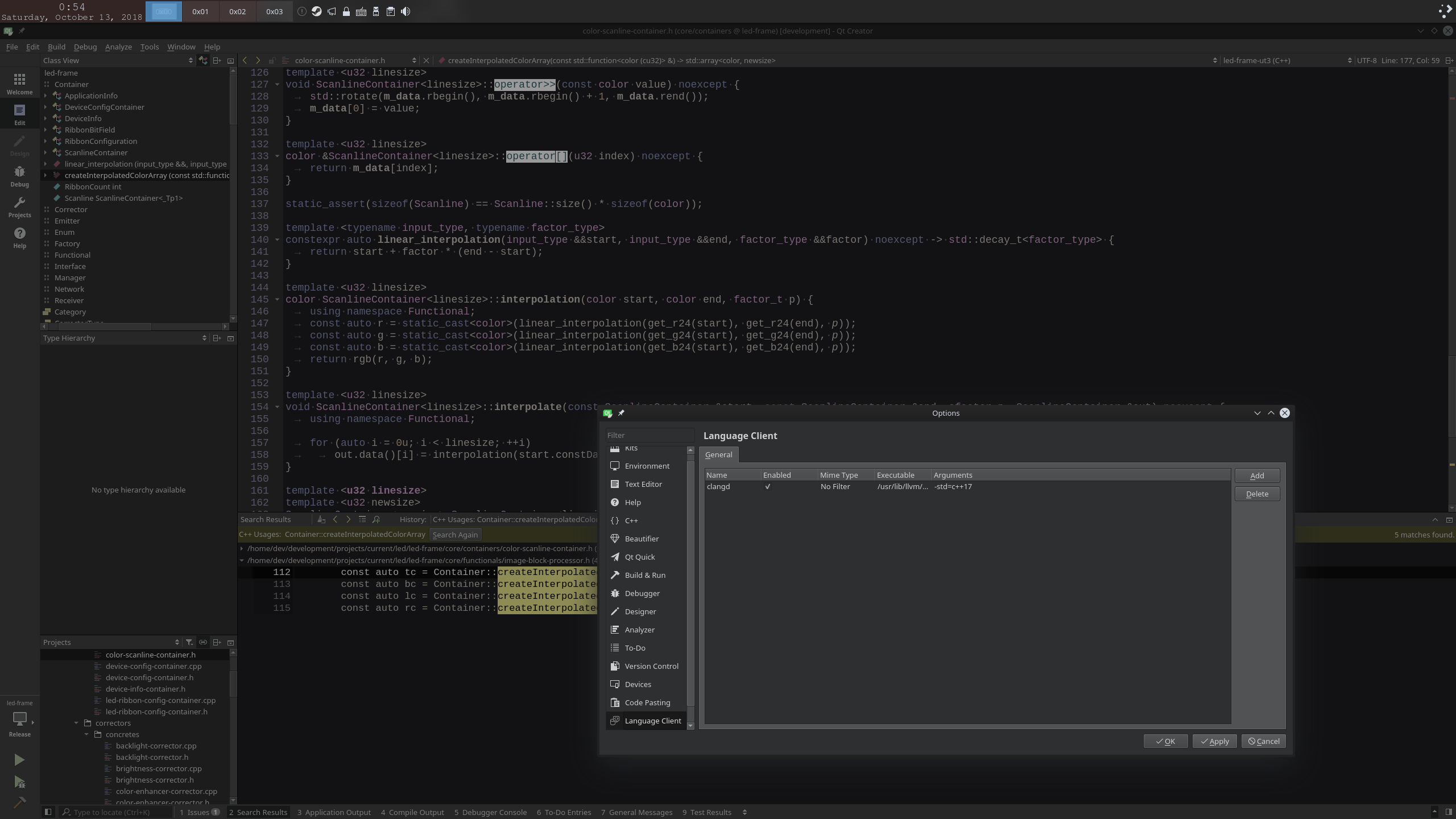
The new version of Qt-Creator arrived with experimental support for Language Server Protocol. This allow qtcreator to work with compiler that implements LSP and give a precise information about code that you’re writing. This feature is highly required to get rid of poorly written parsers in many C++ IDE’s. I’m looking forward of LSP implementation in KDevelop, that I’m using currently to develop software for avr micro-controllers.